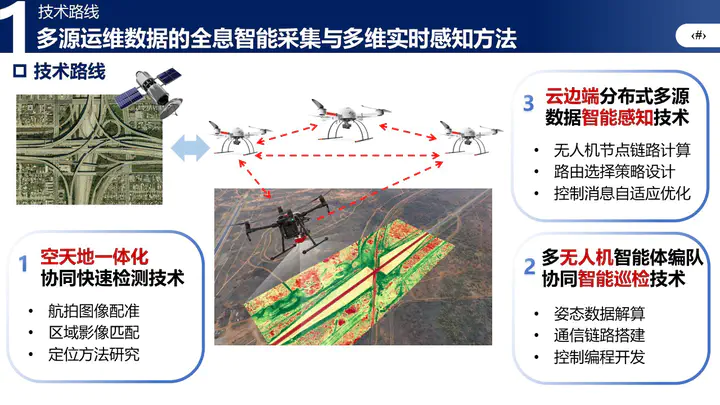
研究基于天基卫星快速解译、空基多智能体协同巡检以及地基IOT群体传感的空天地一体化运维性态信息的实时智能感知方法,研发基于网联资源调度的“端-边”数据校验与保障算法,研究基于多智能体无人系统的多源运维数据感知方法。
基于新型智能运维感知智能体,设计智能体分簇策略和基于链路感知的路由选择策略,建立簇首智能体无人自组网方法;研究自组网多点广播中继机制,提出近“端-边”侧数据校验与保障算法,突破基于负载均衡的网联资源调度分配和智能自组网技术,实现“端-边”数据有效、高效并网并提高通信网络吞吐量。面向运维过程中准实时性、高准确性和强鲁棒性的需求,搭建分层分布式的多智能体协同处理架构,提升多智能体间、多智能体与运维设施间的信息协同、性态感知与联动控制能力。该技术预期开发领先的分布式自组网和感知智能体群组网技术,降低智能感知系统的延时性,预计获得专利、学术论文等形式的知识产权。
面向区域建筑群与市政公用设施集群全寿命期运维情景,研究空天地一体化广域运维监测与多源数据协同采集方法,结合卫星、5G、物联网、光纤等技术,研发空天地一体化全息协同感知技术,实现多源运维数据的全息采集与实时感知,提升广区域、多层次、立体化的空间协同监测能力。该技术预期实现覆盖范围不小于2平方公里级的城市建筑群、桥梁隧道边坡群的区域集群空天地协同监测,获得专利、学术论文等形式的知识产权。